Various cookies are used on our website: We use technically necessary cookies for the purpose of enabling functions such as login or a shopping cart. We use optional cookies for marketing and optimization purposes, in particular to place relevant and interesting ads for you on Meta's platforms (Facebook, Instagram). You can refuse optional cookies. More information on data collection and processing can be found in our privacy policy.
Virtuell geplant – vom Roboter gefertigt – mit neuer Übertragungstechnologie eingesetzt
Dipl.-Ing. Mag. Christian Url, Orthorobot Medizintechnik GmbH
Mit moderner kieferorthopädischer Diagnose- und Behandlungsplanungssoftware ist es jeder Kieferorthopädin und jedem Kieferorthopäden möglich, auf Basis digitaler 3-D-Modelldaten Behandlungsplanungen am Computer eigenhändig zu erstellen und eine darauf basierende Multibracketapparatur zu planen. Aufgrund des einfachen Versands digitaler Daten per Internet kann jeglicher Arbeitsschritt des Planungs- und Laborprozesses (Digitalisierung des Modells, Set-up-Erstellung, Planung der Apparatur), je nach Präferenz, an einen externen Dienstleister ausgelagert werden. Dipl.-Ing. Mag. Christian Url stellt in seinem Beitrag aus der Kieferorthopädie 1/2017 einen digital integrierten Laborprozess vor, mit dem die geplante Apparatur mittels Robotertechnik gefertigt und somit die virtuell geplante Zielsituation klinisch exakt umgesetzt werden kann [Kieferorthopädie 2017;31(1):27–35].
Die „Kieferorthopädie“ informiert viermal im Jahr über die neuesten Erkenntnisse und Entwicklungen aus Praxis und Wissenschaft. Die Beiträge befassen sich mit allen Sachgebieten der modernen Kieferorthopädie. Praxisnahe Patientenberichte und Übersichtsartikel bilden das Herzstück jeder Ausgabe. Kongressberichte, Buchbesprechungen, Praxistipps, Interviews und eine ausführliche Übersicht über kieferorthopädische Fortbildungsveranstaltungen runden das redaktionelle Spektrum ab. Eine Vielzahl von anschaulichen, zum größten Teil farbigen Abbildungen in optimaler Reproduktionsqualität illustriert die einzelnen Beiträge. Mit kostenlosem Zugang zur Online-Version recherchieren Abonnenten komfortabel online – auch rückwirkend ab 2003 im Archiv. Kostenloser Zugang zur App-Version für Abonnenten. Mehr Infos zur Zeitschrift, zum Abo und zum Bestellen eines kostenlosen Probehefts finden Sie im Quintessenz-Shop.
Einleitung
Die virtuelle Simulation hat in den vergangenen 30 Jahren vor allem in den Ingenieurwissenschaften Entwicklungen ermöglicht, die vor Einführung der digitalen Technologien undenkbar gewesen wären. Die immer kürzer werdenden Entwicklungszyklen von Gebrauchsgütern aller Art wären ohne virtuelle Konstruktions- und Testverfahren nicht möglich. Wurden zuvor neue Konstruktionen und Materialien in aufwendigen Labor- oder Feldtests evaluiert, so kann heute ein Großteil dieser Tests mithilfe von Computersimulationen kostengünstig und schnell schon lange vor der Herstellung des ersten gegenständlichen Prototyps durchgeführt werden. Ziel dieser Simulationen ist stets, etwaige Fehler bereits in der Planungsphase zu entdecken und zu beseitigen, denn je später im Entwicklungsprozess ein Fehler gefunden wird, desto teurer ist dessen Beseitigung.
Virtuelle Planung und Simulation ist in der Kieferorthopädie im zweidimensionalen Bereich schon lange Stand der Technik. Die digitale Fernröntgenanalyse oder Weichteilsimulation mithilfe des Fotomorphings sind seit mehr als 20 Jahren Routine. Softwares zur dreidimensionalen Simulation von kieferorthopädischen Behandlungen hat jedoch erst in den vergangenen fünf Jahren größere Verbreitung gefunden. Mit der Verfügbarkeit von 3-D-Scannern, die Dentalmodelle oder intraoral direkt das Gebiss des Patienten digitalisieren, wurde auch der Bedarf an entsprechender dreidimensionaler Planungs- und Simulationsmöglichkeiten geweckt.
Heute existiert praxistaugliche Software, die nicht nur dreidimensionale Behandlungsplanungen (virtuelles Set-up-Model), sondern auch die digitale Konstruktion einer entsprechenden individuellen therapeutischen Apparatur ermöglicht. CAD/CAM- Herstellungsmethoden wie 3-D-Druck, Fräs- und Robotertechnologie werden genutzt, um diese virtuell konstruierten Apparaturen herzustellen. Die vollindividuelle Apparatur auf Basis einer virtuellen Behandlungssimulation ist heute Realität.
Größter Aufwand am Ende der Behandlung
Damit steht die Kieferorthopädie am Beginn eines Paradigmenwechsels. Aufgrund der hohen Kosten wird heute meist auf die Herstellung eines manuellen Ziel-Set-up-Modells im Labor verzichtet – eine genaue dentale Simulation des Behandlungsergebnisses existiert daher bei Behandlungsbeginn nicht. Zusammen mit der Verwendung mittelwertiger, nicht individueller Bracketsysteme und vorgefertigter Drahtbogenformen bedingt dies eine im Verhältnis zur Gesamtbehandlungsdauer lange und daher kostenintensive Feineinstellungsphase. In dieser Phase wird das Wissen und Geschick der Kieferorthopädin oder des Kieferorthopäden bei der Durchführung von Korrekturschritten bei jedem Patiententermin benötigt. Der größte Aufwand entsteht am Ende der Behandlung.
Die 3-D-Planungssoftware eliminiert dieses Problem. Sie ermöglicht die detaillierte Planung sowohl der finalen dentalen Situation als auch der dafür nötigen therapeutischen Apparatur. Diese individuellen Brackets und Drahtbögen sorgen für ein sicheres und geradliniges Erreichen der geplanten Endsituation. Die dabei zum Einsatz kommende indirekte Bracketpositionierung verkürzt zudem die Stuhlzeit beim Einsetzen der Apparatur und stellt die korrekte Bracketplatzierung sicher. In der Feineinstellungsphase muss die Kieferorthopädin oder der Kieferorthopäde seltener eingreifen.
In diesem Beitrag wird der Laborprozess der Firma Orthorobot Medizintechnik GmbH (Wien, Österreich) vorgestellt, mit dem auf Basis einer virtuellen, dreidimensionalen Behandlungsplanung eine individuelle Multibracketapparatur inklusive individueller Drahtbögen hergestellt wird.
Digitaler Laborprozess in analoger Praxisumgebung
Obwohl sich 3-D-Modelscanner und Intraoralscanner rasch verbreiten, sind die meisten kieferorthopädischen Praxen heute noch nicht mit einem solchen Gerät ausgestattet. Die Zusammenarbeit mit Orthorobot ermöglicht einer Praxis, die Vorteile der digitalen Kieferorthopädie zu evaluieren, ohne vorab in neue Ausstattung investieren zu müssen. Die Zusammenarbeit zwischen Praxis und Labor kann dabei in Bezug auf die Datenerfassung in unterschiedlichen Ausbaustufen gestaltet werden: Von konventionell analog (Abdrucknahme und Postversand, Digitalisierung im Labor) über teilweise digital (konventioneller Abdruck, Digitalisierung in Praxis mit Desktopscanner oder von Scandienstleister, Datenübertragung über Internet) bis vollständig digital (Erfassung mittels Intraoralscanner, Datenübertragung über Internet).
Auch in Bezug auf die Planungssoftware kann praxisseitig je nach Präferenz auf den Laborprozess Einfluss genommen werden. Orthorobot verwendet als Planungs- und Konstruktionssoftware Spezialmodule der allgemein erhältlichen kieferorthopädischen Bildverwaltungs- und Analysesoftware OnyxCeph³ (Image Instruments, Chemnitz). Die Verwendung dieser Software ist keine Voraussetzung für die Zusammenarbeit mit Orthorobot – ist sie jedoch vorhanden, kann an jedem Punkt der Planung praxisseitig eingegriffen werden. So kann zum Beispiel eine laborseitig hergestellte Set-up-Planung vom Auftraggeber eigenhändig abschließend feineingestellt werden, bevor die entsprechende Apparatur zur Produktion freigegeben wird. Die Kommunikation zwischen Praxis und Labor funktioniert dabei direkt in der Software auf Tastendruck über eine Internetschnittstelle.
Durch die freie Gestaltung der Zusammenarbeit kann jede Praxis sofort von den Vorteilen der digitalen Planung profitieren, während nach eigenem Tempo digitale Technologien in die Praxis Schritt für Schritt eingeführt werden. So können je nach Wunsch nach und nach immer mehr Aufgaben (und Wertschöpfung) vom Fremdlabor in die eigene Praxis übernommen werden.
Laborprozess Schritt für Schritt
Ausgangsbasis des Laborprozesses ist ein digitales Zahnmodell. Sind praxisseitig digitale Modelldaten vorhanden (von einem 3-D-Modellscanner oder Intraoralscanner), können diese über eine Internetschnittstelle an das Labor gesendet werden. Konventionelle Abdrücke werden über den Postweg an das Labor geschickt und laborseitig digitalisiert. In vielen Fällen sind zusätzliche Foto- und Röntgenbefunde bei der Erstellung einer Behandlungsplanung hilfreich. Diese können ebenfalls digital an das Labor übertragen werden.
Abb. 1 Synthetische Wurzeln können den realen Wurzeln nachgebildet werden.
Im ersten Planungsschritt werden die klinischen Einzelzahnkronen am digitalen Modell segmentiert und mit errechneten, synthetischen Wurzeln zu vollständigen Zahnobjekten komplettiert. Sind dreidimensionale Volumendaten (CT oder DVT) vorhanden, können die synthetisch vervollständigten Wurzeln der Einzelzähne den realen Wurzeln in Achse und Länge nachgebildet werden, sodass in der Planung annähernd realistische Wurzelpositionen zur Verfügung stehen (Abb. 1).
Abb. 2 Überlagerung des Set-up-Modells (weiß) mit der Malokklusion (blau transparent).
Die Ziel-Set-up-Planung ist das Herzstück des Laborprozesses. Da die Zielposition der Zähne über eine individuelle Apparatur klinisch exakt umgesetzt wird, ist die Qualität der Planung entscheidend für die Qualität des Behandlungsergebnisses. Zur Optimierung wird daher jede Planung in engem Austausch zwischen bearbeitendem Techniker und laborinterner ärztlicher Aufsicht durchgeführt. Erst nach finaler ärztlicher Prüfung wird die Set-up-Vorschau zur Freigabe an den Auftraggeber versendet. In der Set-up-Vorschau können das Zielmodell und die Malokklusion in der korrekten Korrelation überblendet werden (Abb. 2). Zusätzlich wird eine genaue Auflistung der durchgeführten Bewegungen und etwaiger approximaler Schmelzreduktion für jeden Zahn übermittelt. Dies gibt einen sofortigen Überblick über die nötigen klinischen Maßnahmen – der Aufwand für die Set-up-Prüfung wird dadurch für den Kunden auf ein Minimum reduziert. Mehr als 90 Prozent aller Set-up-Planungen von Orthorobot werden von deren Auftraggebern ohne Korrekturwünsche zur Bracketpositionierung freigegeben.
Nach erfolgter dentaler Zielplanung wird die Bracketpositionierung am virtuellen Zielmodell geplant. Hinsichtlich der Bracketauswahl ist der Orthorobot-Laborprozess offen gestaltet, nahezu jedes kommerziell erhältliche Bracketsystem kann verwendet werden. Es ist daher für den Kunden möglich, sein bevorzugtes Bracketsystem positionieren zu lassen. Gemeinsam mit individuell gebogenen Finishing-Drähten entsteht so eine auf die gewünschte Zielsituation „maßgeschneiderte“ Apparatur mit den bewährten Handling-Eigenschaften des bekannten Bracketsystems.
Abb. 3 Bracketpositionierung auf Idealbogen.
Zwischen der geplanten dentalen Zielposition und der Geometrie des verwendeten Bracketsystems existiert immer eine mehr oder weniger ausgeprägte Diskrepanz. Diese kann entweder durch eine individuelle Kleberbasis oder durch Korrekturbiegungen im Draht ausgeglichen werden. Bei Orthorobot wird versucht, die Geometrie des Drahtbogens so einfach wie möglich zu halten. Alle Brackets werden in einer Klebeebene positioniert. Wann immer möglich wird durch eine mit Komposit individualisierte Bracketbasis der Sitz des Brackets so festgelegt, dass ein idealer Finishing-Drahtbogen mit einer minimalen Anzahl an Biegungen ausschließlich erster Ordnung entsteht (Abb. 3). Die dadurch sehr einfache Drahtgeometrie kann ggf. in der Feineinstellungsphase mit manuell eingebogenen Korrekturen schnell stuhlseitig angepasst werden. Es muss dafür kein neuer Draht beim Labor angefordert werden. Korrekturbiegungen im Draht werden laborseitig nur geplant, wenn der ansonsten resultierende Abstand des Brackets und damit die Kleberbasis zu groß würde.
Abb. 4 Detailplanung der Bracketpositionierung sowie Kollisionsprüfung.
Die Planung am Computer gibt genaue Kontrolle hinsichtlich einer kollisionsvermeidenden Positionierung der Brackets, ebenso wie zur Optimierung der Klebelinie der Straightwire-Apparatur (Abb 4). Sowohl Patient als auch Kieferorthopäde profitieren von der geringeren Gefahr des Bracket- Verlusts, der kleineren oder nicht vorhandenen Aufbisse und dem optimierten Kraftansatzpunkt (z. B. exzentrische Positionierung für optimierte Rotationsbewegung). Als letzter Schritt der virtuellen Bracketpositionierung werden alle bewegten Zähne gemeinsam mit den positionierten Brackets in ihre Malokklusionsposition zurückgesetzt.
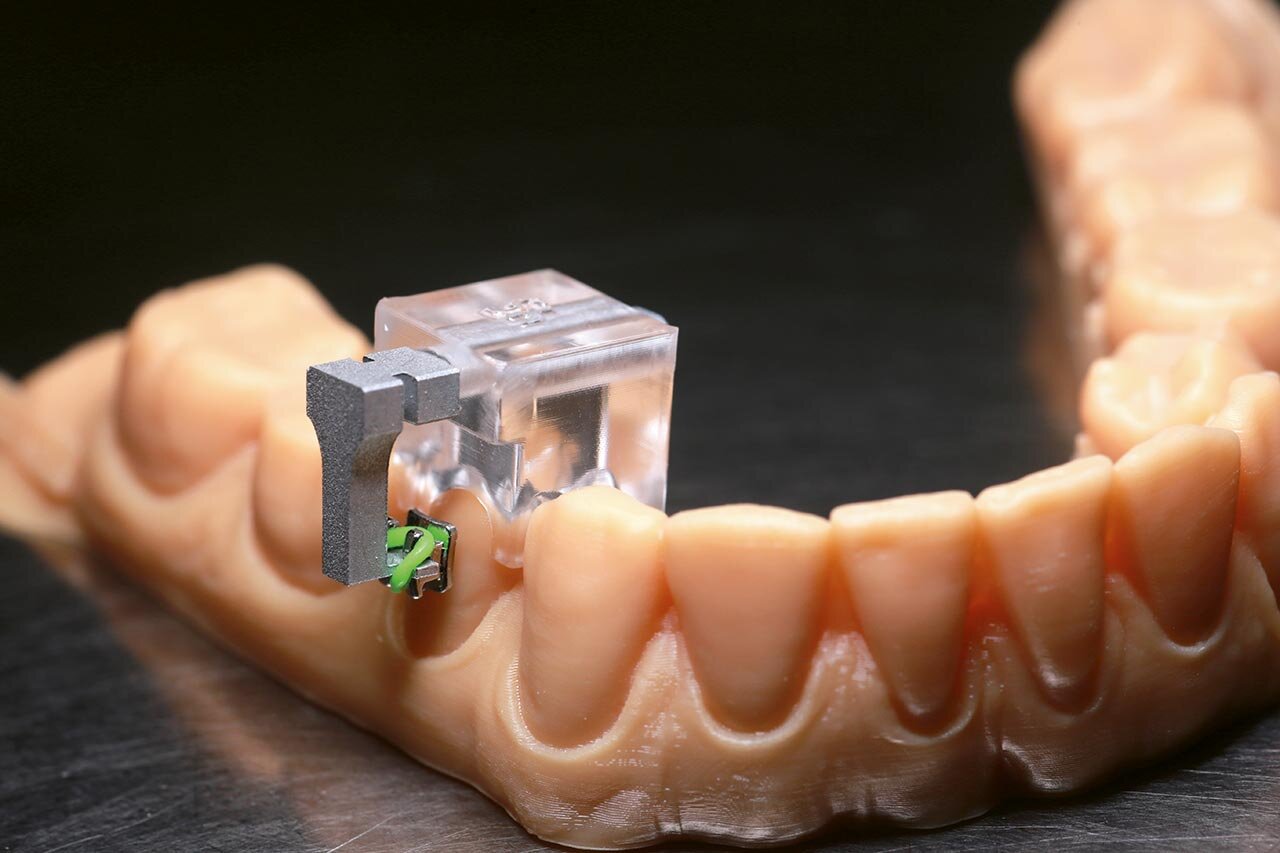
Abb. 5 Bracketpositionierung und -individualisierung mit Roboterarm.
Die Übertragung der virtuellen Bracketposition erfolgt bei Orthorobot mithilfe eines 6-Achs-Industrieroboters. Dieser positioniert die gewünschten Brackets auf das gegenständliche Malokklusionsmodell. Das zum Kleben verwendete Kompositmaterial wird zu einer individuellen Bracketbasis geformt und verbleibt auf dem Bracket (Abb. 5).
Neuentwicklung der Einzelübertragungstechnologie
Abb. 6 Clear-Tray mit geteilter weicher Folie und Brackets mit individuellen Basen.
Standardmäßig werden für die zeitsparende initiale Beklebung zweiphasige Clear-Trays im Tiefziehverfahren hergestellt. Eine dickere, weiche Innenfolie hält die Brackets, eine dünne, härtere wird außen für die gleichmäßige Druckausübung bei der Beklebung auf die weichere aufgelegt. Das klare Tray erlaubt eine sichere optische Prüfung des Bracketsitzes im Mund vor dem Kleben (Abb. 6). Um das Handling weiter zu erleichtern wird empfohlen, die standardmäßig in Frontzahn- und Seitenzahnbereiche geteilten Klebetrays einzeln nacheinander zu kleben.
Da die Brackets bereits exakt an die Zahnmorphologie angepasste Basen haben, ist zum klinischen Kleben nur noch dünnflüssiges Klebematerial (Bonding) nötig. Das Orthorobot-Klebeprotokoll empfiehlt ein zweiphasiges, chemisch aushärtendes Kleber-Set. Der Aushärteprozess dieses Klebers wird erst gestartet, wenn Teil A (auf den Zahn aufgetragen) und Teil B (auf die Bracketbasis aufgetragen) beim Positionieren des Trays im Mund zusammentreffen. Dadurch kann beim indirekten Kleben ruhig, exakt und ohne Zeitdruck gearbeitet werden.
Abb. 7 Einzelübertragungs-Jig.
Mittlerweile werden zusätzlich zum Clear-Tray wiederverwendbare Einzelübertragungs-Jigs für jeden beklebten Zahn zu jedem Fall mitgeliefert. Diese werden für initial nicht beklebbare Zähne verwendet, bzw. für die Repositionierung, wenn sich ein Bracket gelöst haben sollte. Die Einzel-Jigs erlauben auch die sichere Positionierung eines neuen Brackets, wenn das ursprüngliche individualisierte Bracket verloren ging. Dadurch ist selbst bei Verlust des Brackets keine erneute Labordienstleistung vonnöten, das Rebonding kann im selben Termin direkt am Stuhl erfolgen. Die EinzelJigs werden ebenfalls virtuell konstruiert und in einem Rapid-Prototyping-Verfahren hergestellt (Abb. 7).
Individuell gebogene Drahtbögen komplettieren die auf die gewünschte Zielsituation programmierte Apparatur. Diese Drähte werden ebenfalls von einem Roboter gebogen (Abb. 8). Die dafür erforderlichen Daten stammen aus der virtuellen Ziel-Set-up-Planung. Die Bandbreite des Drahtmaterials für individuelle Drahtbögen reicht von .012 Ni-Ti bis .019x.025 Stainless Steel. Die Auswahl der Drähte kann vom Kunden spezifiziert oder nach Wunsch vom Labor vorgeschlagen werden.
Nach Herstellung der Apparatur im Labor wird diese zum vereinbarten Liefertermin zugestellt. Die Versandbox enthält die individualisierten Brackets
in Übertragungstrays, Einzelübertragungs-Jigs für jeden Zahn für späteres Kleben oder Repositionierung nach Bracketverlust, die individuellen Drahtbögen, Bilddokumentation zum Bracketsitz in Mal- und Zielokklusion, etwaige Zusatzinformationen und ein Informationsblatt über das von Orthorobot empfohlene Klebeprotokoll.
Abb. 9 bis 13 Anfangsbefund im Alter von 13 Jahren.
Abb.10
Abb. 11
Abb. 12
Abb. 13
Abb. 14 und 15 FRS und OPG zu Behandlungsbeginn.
Abb. 15
Abb. 16 bis 21 Virtuelles Set-up-Modell.
Abb. 17
Abb. 18
Abb. 19
Abb. 20
Abb. 21
Abb. 22 Virtuelle Bracketpositionierung.
Abb. 23 bis 27 Indirekte Klebetechnik.
Abb. 24
Abb. 25
Abb. 26
Abb. 27
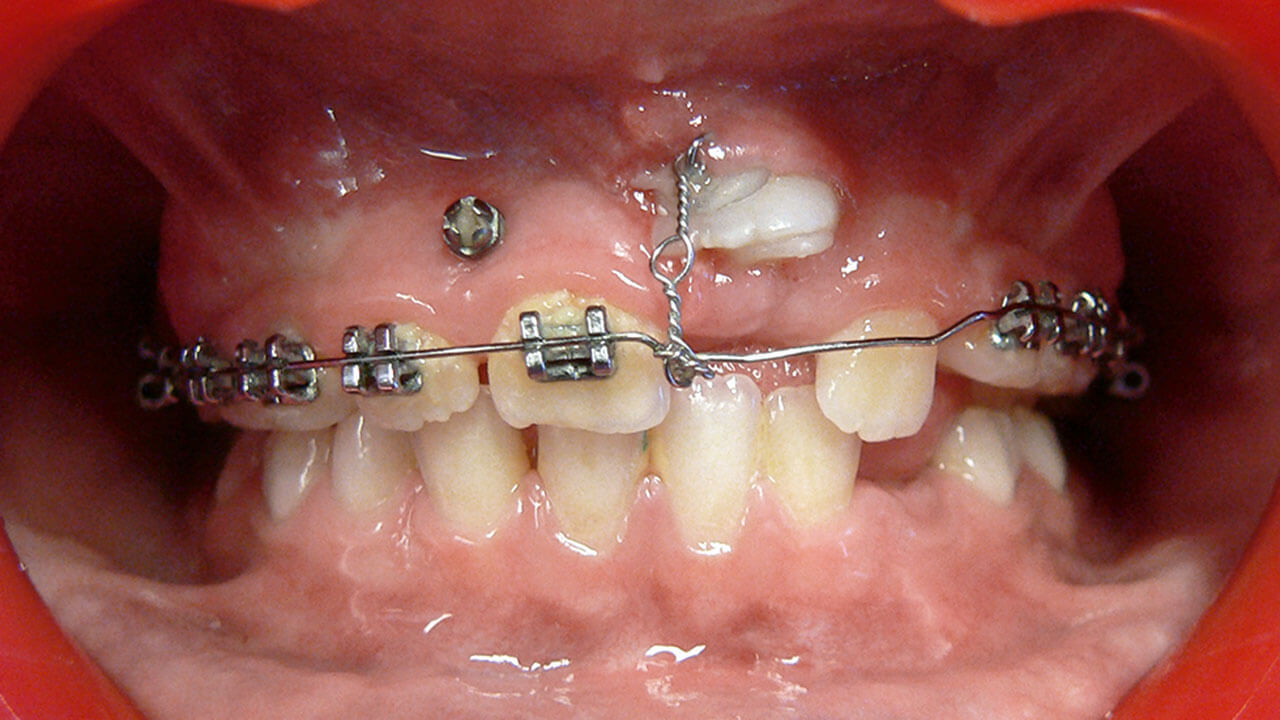
Abb. 28 und 29 Klinische Situation nach Einsetzen der Apparatur. Seitliche Aufbisse beidseits.
Abb. 29
Abb. 30 Beispiel für Finishing-Bogen im Oberkiefer.
Abb. 31 bis 35 Zustand nach Entfernung der Apparatur.
Abb. 32
Abb. 33
Abb. 34
Abb. 35
Klinisches Beispiel
Im Folgenden wird beispielhaft ein Patient aus der Praxis von Dr. Dr. Silvia M. Silli (Wien, Österreich) vorgestellt, der mit Unterstützung der oben beschriebenen Labortechnik behandelt wurde (Abb. 9 bis 35).
Der Patient stellte sich im Alter von 13 Jahren in der Praxis erstmals vor. Die klinische und radiologische Untersuchung ergab folgende Befunde:
rechts Klasse-I, links ½ Pb Klasse-II, Overjet 3 mm, Overbite ½,
dentoalveoläre Mittellinienverschiebung im OK nach rechts 2 mm,
OK- und UK-Frontengstand, zirkulär Einzelzahnabweichungen,
verzögerter Durchbruch der zweiten Molaren mit Verlagerungstendenz 17 und 47.
Mithilfe eines virtuellen Set-ups erfolgten die Vorbereitung der einzelnen Behandlungsschritte und der Ausschluss alternativer Therapieoptionen (Slicing, Extraktionen). Anhand des digitalen Modells konnte eine individuelle Platzierung der Brackets, die Gestaltung der Bracketbasen sowie die Konfiguration jedes einzelnen Bogens durchgeführt werden. Die indirekte Klebetechnik verkürzte die Behandlungszeit in der Praxis und konnte die Belastung für den Patienten deutlich senken. Alle Bogenwechsel erfolgten gemäß Planung und sehr effizient. Die Feineinstellung der Verzahnung (Finishing) konnte durch die vorprogrammierten und individualisierten Endbögen ohne zusätzliche Drahtbiegungen bzw. ohne Umkleben von Brackets erreicht werden. Die Sicherung des Behandlungsergebnisses erfolgte mit einem Kleberetainer im Unterkiefer und einem Hawley-Retainer im Oberkiefer.
Fazit
Die Virtualisierung des Laborprozesses erleichtert die Zusammenarbeit zwischen Praxis und Labor. Zu jedem Zeitpunkt kann die virtuelle Planung praxisseitig über eine Internetschnittstelle geprüft oder eigenhändig angepasst werden. In Kombination mit einem Intraoralscanner läuft der gesamte Prozess bis zur Herstellung der Apparatur am Roboter rein digital ab – der etwaige Postversand von Abdrücken entfällt.
Durch das virtuelle Set-up ist das genaue Behandlungsziel schon vor Behandlungsbeginn bekannt, dafür notwendige Zahnbewegungen sind durch die virtuelle Planung genau quantifizierbar, die Relation zur Malokklusion bleibt erhalten.
Die indirekte Bracketklebetechnik verkürzt die benötigte Zeit für Einsetztermine. Unsicherheiten bezüglich der Bracketpositionierung entfallen. Die individuell robotergebogenen Drähte ermöglichen ein Finishing auf höchstem Qualitätsniveau in einer kürzeren Behandlungszeit. Manuelle Korrekturen entfallen meist, können aber bei Bedarf aufgrund der einfachen Bogengeometrie schnell stuhlseitig durchgeführt werden.
Our systems reports that you are using an active AdBlocker software, which blocks all page content to be loaded.
Fair is fair: Our industry partners provide a major input to the development of this news site with their advertisements. You will find a clear number of these ads at the homepage and on the single article pages.
Please put www.quintessence-publishing.com on your „adblocker whitelist“ or deactivate your ad blocker software. Thanks.